Статические характеристики. Основы автоматического регулирования
Лекция №3.
Различают следующие значения регулируемой величины:
v предписанное значение регулируемой величины x пр (t) – это значение, соответствующее требуемому режиму работы объекта регулирования;
v действительное значение регулируемой величины x действ. (t) – соответствующее фактическому режиму работы объекта регулирования;
v ошибка регулирования ∆x(t) – разность между предписанным и действительным значениями;
v статическая ошибка регулирования ∆x(∞) – ошибка в установившемся режиме.
При построении систем управления используют некоторые общие принципы среды, которых следует выделить 3 основных:
1. Принцип разомкнутого или программного управления.
2. Принцип компенсации.
3. Принцип обратной связи или стабилизирующего управления.
II . Принцип компенсации – используется в том случае, если возмущающие воздействия очень велики и алгоритм разомкнутого управления не обеспечивает требуемой точности управляемого процесса.
Если возмущение можно измерить, то к программному управлению μ(t) добавляется компенсационная составляющая μ к (t), которая формируется в устройстве компенсации (УК). С помощью такой корректировки управления можно полностью или частично скомпенсировать влияние внешнего воздействия.
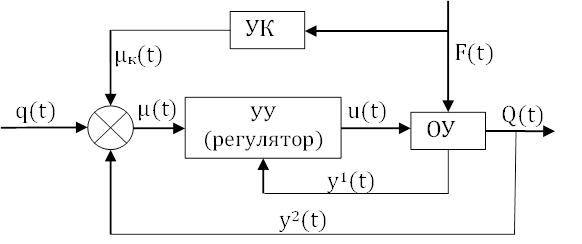 |
III . Принцип обратной связи или стабилизирующего управления (или регулирования по отклонению) – наиболее часто используется при проектировании САУ. В этом случае управляющее воздействие формируется не только в зависимости от желаемого поведения объекта, но также в зависимости от фактического его состояния.
Статические характеристики звеньев САУ.
Поведение системы как в статике, так и в динамике определяется поведением составляющих звеньев.
Звено – это условно-выделенная часть автоматического устройства, функционирующая по определенному алгоритму. Звенья в системе взаимодействуют посредством связи.
Связь – это условно-выделенная часть системы, отражающая направление взаимодействия между звеньями.
То есть любая система может быть представлена в виде звеньев и связей между ними. Точка приложения входной координаты является входом звена, а выходной координаты выходом. Функциональная зависимость установившихся значений выходных и входных координат называется статической характеристикой звена. (в предыдущем рисунке Q=f(u) – статическая характеристика).
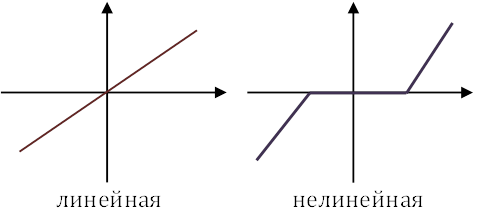
По виду статической характеристики все звенья делятся на статические, астатические, линейные и нелинейные.
Статические звенья – у которых функциональная связь между выходной и входной координатами в рабочей области непрерывная и монотонная, то есть каждому значению входной координаты соответствует единственное значение выходной. Если при этом статическая характеристика линейная или достаточно точно может быть аппроксимирована прямой (может быть проведена касательная), то такое статическое звено линейно.
При криволинейности статической характеристики или наличии в ней кусочно-линейных участков, статическое звено нелинейно.
 |
Астатические звенья – это звенья, у которых при отсутствии функциональной связи между выходной и входной координатами имеется функциональная связь между входной координатой и изменениями выходной. Например
Порядок производной функциональной зависимости определяет порядок астатизма звена. Выходными координатами звена могут быть разные физические величины, которые влияют на порядок астатизма звена.
Рассмотрим
астатическое звено 2-го порядка: ![]() S – перемещение. Если выходную координату
принять в виде скорости, то астатизм звена понизится до 1-й степени -
S – перемещение. Если выходную координату
принять в виде скорости, то астатизм звена понизится до 1-й степени - ![]() А если выходной координатой принять ускорение, то
астатическое звено станет статическим, появится линейная зависимость a
=
f
(x
)
.
А если выходной координатой принять ускорение, то
астатическое звено станет статическим, появится линейная зависимость a
=
f
(x
)
.
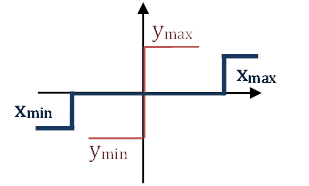 |
Особое значение имеют звенья, которые имеют вертикальный участок на астатической характеристике:
То есть, когда выходная координата изменяется скачком. Подобные звенья относятся к нелинейным, называются релейными и имеют параметры срабатывания и отпускания.
Дифференциальная чувствительность звеньев.
Производная выходной координаты по входной, характеризующая угол наклона касательной к статической характеристике, называется дифференциальной чувствительностью звена .
При нелинейности статической характеристики дифференциальная чувствительность – величина переменная, поэтому пользуются понятием – средней дифференциальной чувствительности , равной тангенсу угла наклона касательной к линеаризованной статической характеристики .
У релейного звена на вертикальном участке дифференциальная чувствительность равна ∞, а на горизонтальном – нулю. В этом случае используют понятие коэффициента управления – равного отношению максимального значения выходной величины к параметру срабатывания: .
Cтраница 1
Статическая характеристика системы при у О представляет собой прямую, параллельную оси абсцисс.
Статические характеристики системы автоматического регулирования или ее отдельного звена отражают связь между величинами, характеризующими систему или звено в состоянии равновесия. Уравнения статики позволяют определить значения регулируемых величин, положения регулирующих органов, расходы вещества или энергии через систему или звено и прочие данные для любого равновесного состояния системы. В настоящей работе статическая характеристика регулирующего органа оценивается по величине ее линейного участка, на котором можно наносить возмущающие воздействия для получения динамических характеристик; составляется также статическое уравнение регулирующего органа.
Статические характеристики систем автоматического регулирования производительности компримирующих агрегатов на компрессорных станциях магистральных газопроводов имеют важное значение для анализа и выбора элементов рассматриваемых установок, позволяют судить о качественных показателях как отдельно работающих машин, так и при схемах их параллельно-последовательного включения.
| Статистические характеристики систем с принципом управления по возмущению (при различной степени компенсации. |
Статической характеристикой системы называется зависимость установившегося значения управляемой величины от возмущающего (задающего) воздействия. Причем значение воздействия при определении одной точки характеристики остается неизменным.
Статической характеристикой системы автоматического регулирования или отдельных ее элементов называется связь между входными и выходными параметрами в установившемся состоянии.
| Структурная схема несвязанной системы автоматического регулирования двух параметров.| Структурная схема связанной системы автоматического регулирования двух параметров. |
Поэтому статическая характеристика системы также определяется статической характеристикой цепи обратной связи. Магнитоэлектрический преобразователь в этой цепи имеет линейную характеристику и поэтому статическая характеристика всей следящей системы - зависимость тока г от момента М - также линейна.
Рассмотрим статические характеристики системы гармонического компаундирования как взаимосвязанной системы основной и гармонической обмоток. Анализ проводится на основе векторной диаграммы генератора для установившегося симметричного режима. Статические характеристики генератора с СГК позволяют установить взаимное влияние генератора и гармонической обмотки при их совместной работе для конкретных исполнений генератора, нагрузки и внешних условий. Исходными данными для получения статических характеристик являются: схема генератора и номинальные значения параметров; состав возмущающих факторов и их характеристики; уравнения агрегатов, записанные в вариациях.
Рассчитывают статические характеристики системы возбуждения двигателя, необходимые для обеспечения требуемых характеристик системы торможения.
Графическое статической характеристики системы с последовательно включенными звеньями.
Наибольший интерес представляет зависимость выходной величины элемента автоматики от его входной величины. При соединении элементов в систему автоматики выходная величина одного элемента подается на вход последующего элемента. Поэтому можно говорить о передаче сигнала в системе. Входную величину обычно называют входным сигналом (будем обозначать его через х), а выходную величину - выходным сигналом (будем обозначать его через у). Режим работы, при котором входной и выходной сигналы постоянны (х = x уст; у = у уст ), называют статическим или установившимся режимом. Характеристики, определяемые в этом режиме, называются статическими.
Следует отметить, что для многих электромеханических и магнитных устройств автоматики сигналом является напряжение или сила переменного тока. В статическом режиме постоянным является действующее значение напряжения или тока, хотя мгновенное значение при этом, естественно, изменяется по синусоидальному закону.
Основной характеристикой всех элементов автоматики является статический коэффициент преобразования К = y уст /x уст. Коэффициент преобразования может быть определен экспериментально. Для этого устанавливают определенное значение входного сигнала х уст и измеряют соответствующий ему выходной сигнал у уст Таких опытов можно провести несколько (для различных значений у уст). По результатам нескольких опытов может быть построена статическая характеристика y-f(x), представляющая функциональную зависимость выходной величины от входной в статическом режиме. Статические характеристики бывают линейными и нелинейными (рис.1.2). Если коэффициент преобразования не зависит от входного сигнала, то статическая характеристика имеет вид прямой линии (рис.1.2, а), а элемент, имеющий такую характеристику, называют линейным. Коэффициент преобразования нелинейных элементов не постоянен, а статическая характеристика может иметь вид, показанный на рис.2, б.
Рис. 1.2. Статические характеристики элементов автоматики
Такая характеристика чаще всего бывает у усилительных элементов. Сначала при увеличении входного сигнала пропорционально ему растет выходной сигнал, а затем рост его прекращается. В магнитных усилителях это связано, например, с явлением насыщения магнитной цепи. Поэтому про характеристику типа (рис.1.2, б) говорят, что она имеет зону насыщения. Особенно явно нелинейность выражена для элементов типа реле. При увеличении входного сигнала реле от нуля до некоторого значения, называемого сигналом срабатывания x ср , выходной сигнал равен нулю. При x = x ср выходной сигнал изменяется скачком и при дальнейшем увеличении входного сигнала остается постоянным (рис. 1.2, в).
Для датчиков чаще всего необходима линейная статическая характеристика, это требуется для точной работы системы.
Коэффициент преобразования имеет размерность, определяемую отношением размерностей выходной величины к входной. Например, датчик, преобразующий перемещение (измеряемое в метрах) в напряжение (измеряемое в вольтах), имеет размерность коэффициента преобразования В/м. Если размерности выходного и входного сигнала одинаковы (например, у усилителей), то коэффициент преобразования будет безразмерной величиной. В этом случае его часто называют коэффициентом усиления.
Выходной сигнал некоторых элементов равен нулю при малых значениях входного сигнала, т. е. эти элементы нечувствительны к слабым сигналам. Статическая характеристика элементов показана на рис.1.2, г . Только при x > |а| начинается изменение выходного сигнала у. В этом случае значение x = а называют порогом чувствительности. Диапазон изменения входного сигнала, при котором выходной сигнал равен нулю, называется зоной нечувствительности. Для элемента, характеристика которого показана на рис.1.2, г , зона нечувствительности равна 2*а.
Точность работы датчика характеризуется погрешностью. Различают абсолютную, относительную и приведенную погрешности. При определении погрешности сравнивают реальную статическую характеристику датчика с идеальной линейной статической характеристикой. Реальная статическая характеристика отличается от идеальной, поскольку выходной сигнал может изменяться за счет внутренних свойств элемента (износ, старение и т.д.) или за счет изменения внешних факторов (напряжение питания, температура и т.д.). Абсолютная погрешность представляет собой разность между реальным у р и расчетным (идеальным) у И выходными сигналами при одном и том же значении входного сигнала х. Абсолютная погрешность имеет размерность выходной величины, ее называют еще ошибкой: ∆ = у р -у И
Относительная погрешность представляет собой отношение абсолютной погрешности к расчетному значению выходной величины и определяется в относительных единицах (δ ОТ = ∆/у И) или в процентах (δ ОТ =(∆/у И)-100) .
Приведенную погрешность определяют как отношение абсолютной погрешности к диапазону возможных значений выходного сигнала. Приведенную погрешность вычисляют в относительных единицах или в процентах. О точности датчика судят обычно по максимальной приведенной погрешности.
2.1. Основные виды САУ
В зависимости от принципа и закона функционирования ЗУ, задающего программу изменения выходной величины, различают основные виды САУ: системы стабилизации, программные, следящие и самонастраивающиеся системы, среди которых можно выделить экстремальные, оптимальные и адаптивные системы.
В системах стабилизации (рис.9,10) обеспечивается неизменное значение управляемой величины при всех видах возмущений, т.е. y(t) = const. ЗУ формирует эталонный сигнал, с которым сравнивается выходная величина. ЗУ, как правило, допускает настройку эталонного сигнала, что позволяет менять по желанию значение выходной величины.
В программных системах обеспечивается изменение управляемой величины в соответствии с программой, формируемой ЗУ. В качестве ЗУ может использоваться кулачковый механизм, устройство считывания с перфоленты или магнитной ленты и т.п. К этому виду САУ можно отнести заводные игрушки, магнитофоны, проигрыватели и т.п. Различают системы с временной программой (например, рис.1), обеспечивающие y = f(t) , и системы с пространственной программой , в которых y = f(x) , применяемые там, где на выходе САУ важно получить требуемую траекторию в пространстве, например, в копировальном станке (рис.11), закон движения во времени здесь роли не играет.
Следящие системы отличаются от программных лишь тем, что программа y = f(t) или y = f(x) заранее неизвестна. В качестве ЗУ выступает устройство, следящее за изменением какого-либо внешнего параметра. Эти изменения и будут определять изменения выходной величины САУ. Например, рука робота, повторяющая движения руки человека.
Все три рассмотренные вида САУ могут быть построены по любому из трех фундаментальных принципов управления. Для них характерно требование совпадения выходной величины с некоторым предписанным значением на входе САУ, которое само может меняться. То есть в любой момент времени требуемое значение выходной величины определено однозначно.
В самонастраивающихся системах ЗУ ищет такое значение управляемой величины, которое в каком-то смысле является оптимальным.

Так в экстремальных системах (рис.12) требуется, чтобы выходная величина всегда принимала экстремальное значение из всех возможных, которое заранее не определено и может непредсказуемо изменяться. Для его поиска система выполняет небольшие пробные движения и анализирует реакцию выходной величины на эти пробы. После этого вырабатывается управляющее воздействие, приближающее выходную величину к экстремальному значению. Процесс повторяется непрерывно. Так как в данных САУ происходит непрерывная оценка выходного параметра, то они выполняются только в соответствии с третьим принципом управления: принципом обратной связи.
Оптимальные системы являются более сложным вариантом экстремальных систем. Здесь происходит, как правило, сложная обработка информации о характере изменения выходных величин и возмущений, о характере влияния управляющих воздействий на выходные величины, может быть задействована теоретическая информация, информация эвристического характера и т.п. Поэтому основным отличием экстремальных систем является наличие ЭВМ. Эти системы могут работать в соответствии с любым из трех фундаментальных принципов управления.
В адаптивных системах предусмотрена возможность автоматической перенастройки параметров или изменения принципиальной схемы САУ с целью приспособления к изменяющимся внешним условиям. В соответствии с этим различают самонастраивающиеся и самоорганизующиеся адаптивные системы.
Все виды САУ обеспечивают совпадение выходной величины с требуемым значением. Отличие лишь в программе изменения требуемого значения. Поэтому основы ТАУ строятся на анализе самых простых систем: систем стабилизации. Научившись анализировать динамические свойства САУ, мы учтем все особенности более сложных видов САУ.
2.2. Статические характеристики
Режим работы САУ, в котором управляемая величина и все промежуточные величины не изменяются во времени, называется установившимся , или статическим режимом . Любое звено и САУ в целом в данном режиме описывается уравнениями статики вида y = F(u,f) , в которых отсутствует время t . Соответствующие им графики называются статическими характеристиками . Статическая характеристика звена с одним входом u может быть представлена кривой y = F(u) (рис.13). Если звено имеет второй вход по возмущению f , то статическая характеристика задается семейством кривых y = F(u) при различных значениях f , или y = F(f) при различных u .
Так примером одного из функциональных звеньев системы регулирования воды в баке (см. выше) является обычный рычаг (рис.14). Уравнение статики для него имеет вид y = Ku . Его можно изобразить звеном, функцией которого является усиление (или ослабление) входного сигнала в K раз. Коэффициент K = y/u , равный отношению выходной величины к входной называется коэффициентом усиления звена. Когда входная и выходная величины имеют разную природу, его называют коэффициентом передачи .
Статическая характеристика данного звена имеет вид отрезка прямой линии с наклоном a = arctg(L 2 /L 1 ) = arctg(K) (рис.15). Звенья с линейными статическими характеристиками называются линейными . Статические характеристики реальных звеньев, как правило, нелинейны. Такие звенья называются нелинейными . Для них характерна зависимость коэффициента передачи от величины входного сигнала: K = y/uconst .
Например, статическая характеристика насыщенного генератора постоянного тока представлена на рис.16. Обычно нелинейная характеристика не может быть выражена какой-либо математической зависимостью и ее приходится задавать таблично или графически.
 Зная статические характеристики
отдельных звеньев, можно построить статическую характеристику САУ (рис.17, 18).
Если все звенья САУ линейные, то САУ имеет линейную статическую характеристику
и называется линейной
. Если хотя бы одно звено нелинейное, то САУ нелинейная
.
Зная статические характеристики
отдельных звеньев, можно построить статическую характеристику САУ (рис.17, 18).
Если все звенья САУ линейные, то САУ имеет линейную статическую характеристику
и называется линейной
. Если хотя бы одно звено нелинейное, то САУ нелинейная
.
Звенья, для которых можно задать статическую характеристику в виде жесткой функциональной зависимости выходной величины от входной, называются статическими . Если такая связь отсутствует и каждому значению входной величины соответствует множество значений выходной величины, то такое звено называется астатическим . Изображать его статическую характеристику бессмысленно. Примером астатического звена может служить двигатель, входной величиной которого является напряжение U , а выходной - угол поворота вала , величина которого при U = const может принимать любые значения. Выходная величина астатического звена даже в установившемся режиме является функцией времени.
2.3. Статическое и астатическое регулирование
 Если на управляемый процесс действует
возмущение f
, то важное значение имеет статическая характеристика САУ
в форме y = F(f)
при y o
= const
.
Возможны два характерных вида этих характеристик (рис.19). В соответствии с
тем, какая из двух характеристик свойственна для данной САУ, различают статическое
и астатическое регулирование
.
Если на управляемый процесс действует
возмущение f
, то важное значение имеет статическая характеристика САУ
в форме y = F(f)
при y o
= const
.
Возможны два характерных вида этих характеристик (рис.19). В соответствии с
тем, какая из двух характеристик свойственна для данной САУ, различают статическое
и астатическое регулирование
.
Рассмотрим систему регулирования уровня воды в баке (рис.20). Возмущающим фактора является поток Q воды из бака. Пусть при Q = 0 имеем y = y o , e = 0 . ЗУ системы настраивается так, чтобы вода при этом не поступала. При Q0 , уровень воды понижается (e0 ), поплавок опускается и открывает заслонку, в бак начинает поступать вода. Новое состояние равновесия достигается при равенстве входящего и выходящего потоков воды. Но в любом случае при Q0 заслонка должна быть обязательно открыта, что возможно только при e0 . Причем, чем больше Q, тем при больших значениях e, устанавливается новое равновесное состояние. Статическая характеристика САУ имеет характерный наклон (рис.19б). Это есть пример статического регулирования . Для получения статического регулирование, все звенья САР должны быть статическими.
 Статические регуляторы работают
при обязательном отклонении e
регулируемой величины от требуемого значения.
Это отклонение тем больше, чем больше возмущение f
. Это заложено в принципе
действия регулятора и не является его погрешностью, поэтому данное отклонение
называется статической ошибкой регулятора
. Из рис.21 видно, что, чем
больше коэффициент передачи регулятора K р
, тем на большую
величину откроется заслонка при одних и тех же значениях e
, обеспечив
в установившемся режиме большую величину потока Q
. Это значит, что на
статической характеристике одинаковым значениям e
при больших K р
будут соответствовать большие значения возмущения Q
, статическая характеристика
САУ пойдет более полого. Поэтому, чтобы уменьшить статическую ошибку надо
увеличивать коэффициент передачи регулятора
. Того же результата можно добиться,
увеличивая коэффициент передачи объекта управления, но это дело конструкторов,
проектирующих данный объект, а не специалистов по автоматике.
Статические регуляторы работают
при обязательном отклонении e
регулируемой величины от требуемого значения.
Это отклонение тем больше, чем больше возмущение f
. Это заложено в принципе
действия регулятора и не является его погрешностью, поэтому данное отклонение
называется статической ошибкой регулятора
. Из рис.21 видно, что, чем
больше коэффициент передачи регулятора K р
, тем на большую
величину откроется заслонка при одних и тех же значениях e
, обеспечив
в установившемся режиме большую величину потока Q
. Это значит, что на
статической характеристике одинаковым значениям e
при больших K р
будут соответствовать большие значения возмущения Q
, статическая характеристика
САУ пойдет более полого. Поэтому, чтобы уменьшить статическую ошибку надо
увеличивать коэффициент передачи регулятора
. Того же результата можно добиться,
увеличивая коэффициент передачи объекта управления, но это дело конструкторов,
проектирующих данный объект, а не специалистов по автоматике.
 Статизм
d
, САР, характеризует
насколько сильно значение регулируемой величины отклоняется от требуемого значения
при действии возмущений, и равна тангенсу угла наклона статической характеристики,
построенной в относительных единицах: d = tg(a) =
(рис.22), где y =
y н
, f = f н
- точка номинального режима САУ. При достаточно больших значениях K p
имеем d
1/K p
.
Статизм
d
, САР, характеризует
насколько сильно значение регулируемой величины отклоняется от требуемого значения
при действии возмущений, и равна тангенсу угла наклона статической характеристики,
построенной в относительных единицах: d = tg(a) =
(рис.22), где y =
y н
, f = f н
- точка номинального режима САУ. При достаточно больших значениях K p
имеем d
1/K p
.
 В некоторых случаях статическая
ошибка недопустима, тогда переходят к астатическому
регулированию, при
котором регулируемая величина в установившемся режиме принимает точно требуемое
значение независимо от величины возмущающего фактора. Статическая характеристика
астатической САУ не имеет наклона (рис.19в). Возможные неточности относятся
к погрешностям конкретной системы и не являются закономерными.
В некоторых случаях статическая
ошибка недопустима, тогда переходят к астатическому
регулированию, при
котором регулируемая величина в установившемся режиме принимает точно требуемое
значение независимо от величины возмущающего фактора. Статическая характеристика
астатической САУ не имеет наклона (рис.19в). Возможные неточности относятся
к погрешностям конкретной системы и не являются закономерными.
Для того, чтобы получить астатическое регулирование, необходимо в регулятор включить астатическое звено, например ИД, между ЧЭ и УО (рис.23).
Если уровень воды понизится, то поплавок переместит движок потенциометра на величину L , за счет этого появится разность потенциалов 0 и ИД начнет поднимать заслонку до тех пор, пока не уменьшится до нуля, а это возможно только при y = y o . При поднятии уровня воды разность потенциалов сменит знак, и двигатель будет вращаться в противоположную сторону, опуская заслонку.
Достоинства и недостатки статического и астатического регулирования : статические регуляторы обладают статической ошибкой; астатические регуляторы статической ошибки не имеют, но они более инерционны, сложны конструктивно и более дороги.
Обеспечение требуемой статической точности регулирования является первой основной задачей при расчете элементов САУ .
Вопросы
- Перечислите и дайте краткую характеристику основных видов САУ?
- Что называется статическим режимом САУ?
- Что называется статическими характеристиками САУ?
- Что называется уравнением статики САУ?
- Что называется коэффициентом передачи, в чем отличие от коэффициента усиления?
- В чем отличие нелинейных звеньев от линейных?
- Как построить статическую характеристику нескольких звеньев?
- В чем отличие астатических звеньев от статических?
- В чем отличие астатического регулирования от статического?
- Как сделать статическую САР астатической?
- Что называется статической ошибкой регулятора, как ее уменьшить?
- Что называется статизмом САР?
- Назовите достоинства и недостатки статического и астатического регулирования?


